






近日,中国热科院农机所在香蕉识别与三维定位研究方面取得新进展。研究团队提出了一种轻量化、高精度的YOLO-BRFB检测模型,并结合双目主动视觉实现香蕉串的实时定位,在边缘计算设备上实现高效部署,为热带果园自动化采收提供了关键技术支撑。
香蕉串的可靠识别与空间定位是实现自动化采收的前提,然而在实际果园环境中,香蕉目标受光照变化、叶片遮挡和背景复杂等因素影响,现有检测方法往往存在模型庞大、计算开销高和部署效率低的问题。针对这些难题,研究团队在YOLOv8框架基础上,创新性地引入BasicRFB模块,有效增强了模型对小目标与复杂背景的特征提取能力,同时降低了网络复杂度。在此基础上,结合双目主动视觉系统实现香蕉串的三维定位,显著提升了在不同光照和遮挡条件下的鲁棒性与精度。
实验结果表明:YOLO-BRFB模型在香蕉检测任务中取得了0.957的精度、0.922的召回率、0.961的mAP和0.939的F1值,整体性能优于原始YOLOv8模型。在定位精度方面,系统的平均定位误差在X、Y、Z三个方向上分别为12.33 mm、11.11 mm和16.33 mm,满足果园作业对空间精度的需求。同时,该系统在NVIDIA Orin NX边缘计算平台上推理时间仅为8.6毫秒,显存占用1.7 GB,具备实时性与高效性。
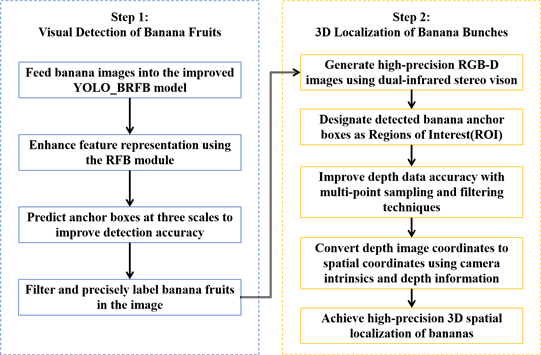
香蕉视觉系统工作流程图
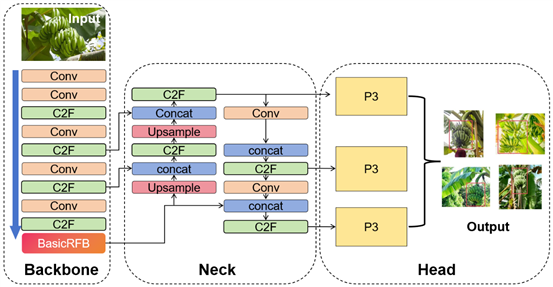
YOLO-BRFB 网络架构
该成果以“Real-Time and Resource-Efficient Banana Bunch Detection and Localization with YOLO-BRFB on Edge Devices”为题发表于《Frontiers in Plant Science》。研究工作由中国热科院农机所与华南农业大学联合完成,王槊助理研究员和韦丽娇副研究员为论文共同第一作者,青年副研究员郑镇辉和华南农业大学段洁利教授为论文共同通讯作者。研究得到国家自然科学基金、海南省重点研发计划、海南省自然科学基金等项目支持。
论文链接:https://www.frontiersin.org/journals/plant-science/articles/10.3389/fpls.2025.1650012/full
 琼ICP备11000394号
琼ICP备11000394号 琼公网安备 46010602000325号
琼公网安备 46010602000325号